Glossary Items I completed in IB 535:
Glossary Items collected from other students in IB 535:
Gecko Feet:
Description of 'the problem' the product will solve"
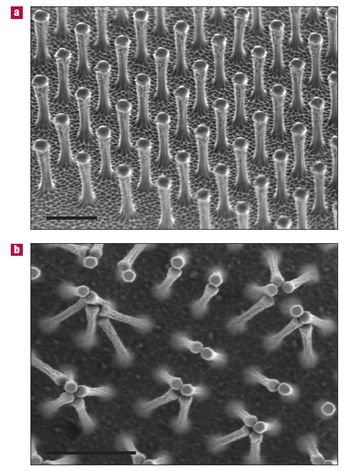
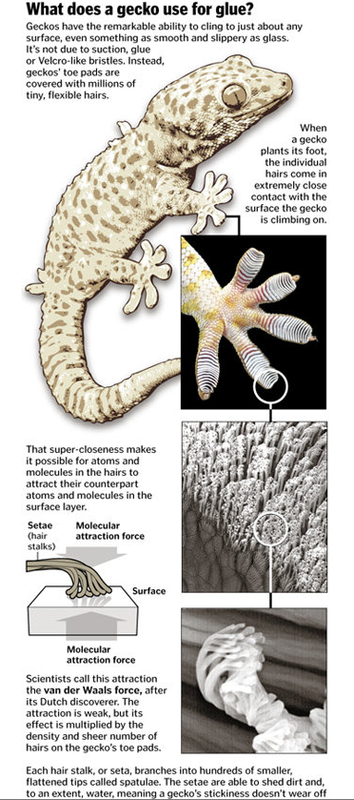
- Most adhesives rely on liquid products that spread over a surface to initiate the adhesive process OR the rely on pressure or exposure to oxygen. Because of the irreversible sticky nature of traditional adhesives and the potential for the adhesive to not only stick to itself or attract dirt or other unwanted particles to its surface, this "gecko" technology solves all of the above. HOW? The secret is in the STRUCTURE not the secretions. In the pictures below, you will notice that the real gecko foot expands and contracts. In the relaxed form, the foot is not adhesive. When the gecko stretches its foot out, the setae spead out flat, increasing the molecular contact with the surface and engaging the intermolecular forces by contact. When the gecko pulls its foot off, the adhesion stops. The gecko's feet do not stick together, and neither does the surface of the artifical fibers created in the lab. SEE PICTURES BELOW.
- Applications of the technology
- Major advantages: reusable, firm contact with surface, does not collect dirt (self-cleaning), won't stick to itself, no liquids involved, less use of flammable and/or glue "vapors." May be used in military or police force to scale walls in combat or hostage situations. Potential applications in space since most adhesives require oxygen for polymerization to occur and do not work in vacuums. (Highfield, 2008
- THE INSPIRATION FROM NATURE: THE BIOLOGY OF GECKO ADHESION
- Geckos have long fascinated the science world by their ability to climb up walls and survey ceilings upside down with ease. Their ability to adhere to a variety of surfaces, including both hydrophillic, hydrohobic materials, fascinated scientists. Most biology adhesive systems involve the attractive forces of thin films of water with another hydrophillic surface. The cohesive forces of water molecules is usually attributed to most biological adhesives but what is unique about the gecko system is that the adhesive process occurs between the gecko's foot and any surface. Most the early scientific studies performed on Geckos included work by Autumn & Peattie (2002) and Andre Geim (Wiki;, 2014). What was discovered in studies peformed by Hansen and Autum (2005) is that the attractive forces are due to the weakest of all intermolecular, that is , the Van Der Waals attractive forces. How can the gecko's use the weakest of all molecular forces to acheive the strongest known attraction to hydrophobic surfaces? The answer lies primarily in the structure of the gecko's foot "setae." (See figures below)
- The gecko's setae are able to flex and lay flat against any surface providing "intimate molecule contact" with any surface. Even in superdry, low humidity environments, gecko's feet are able to take advantage of the atom to atom contact providing by the weak attraction between the nucleus of on atom and the electrons of another. (Autum, 2002). In other words, it is shear NUMBERS of atomic interactions that prevail. See the embedded video clip explaining the role of VanDerWaals forces and Gecko adhesion. In a nutshell it is the very structure of the foot, not an secreting liquid adhesive, that is responsible for the adhesive properties of the gecko's foot.
|
|

Kalundoborg Industry in UK
Biology:
Symbiosis is the co-existence between two or more different organisms where one or more may benefit from the relationship. Sym comes from the Greek origin meaning together, and bios meaning life. Some symbiotic relationships are mutually beneficial, where all parties benefit, others are harmful, where one benefits and one is harmed by the interaction. For example, insect pollinators receive vital nutrients from their plant partners. The plant receives a pollen carrier (the insect) and the pollinator receives vital nutrients from the plants nectar.
Bioinspired Product:
Using the idea of symbiosis the town of Kaluborg, Denmark are using the extra resources and byproducts of different companies for other processes so nothing goes unused or wasted. For example, if one company creates extra heat from their production, the excess heat is used to head homes, or fish farming. If an industrial park creates sulfur as their byproduct, it is given to other companies near by that can utilize it as a source for production. The outcome is reduced consumption of resources and a significant reduction in environmental strain.
Process:
The community of Kalundborg were finding that their largely industrial companies were creating a large amount of waste and by products. The community found that most of the waste and by products being created could be used by other companies in the area, reducing waste and pollution. I believe the companies decided to work together to not only reduce waste, but also save money, since some of their own ingredients needed for production were being "donated" by another company, and did not need to be purchased.
Lotusan
One of the key adaptations plants acquired that allowed for the colonization of land is the incorporation of cuticle on the upper and lower epidermis of most land plants. Cuticle consists of polyester and wax polymers and creates a barrier to prevent desiccation. These lipids are hydrophobic by there very nature. The leaves of some plants like the lotus (Nelumbo nucifera) exhibit what is referred to as “superhydrophobicity,” in that water falling on these surfaces beads to near-perfect spheres and rolls off the surface taking foreign material (i.e. dirt) with it. The secret behind superhydrophobicity has been recently discovered. It has to do not with the chemical composition of the surface alone, but rather the micro- and nano- topography of the surface. Superhydrophobic surfaces like the lotus leaf are covered with microscopic bumps and those bumps are covered with even smaller hair-like projections. Together, this topography keeps less of the water actually in contact with the leaf surface, and the cohesive properties of the water take over forming the droplets. Any agitation, such as a breeze, will cause the droplets to roll off the leaf taking any dirt that is present on the surface with it. It does this because the dirt has a stronger adhesive attraction to the passing water than it does to the superhydrophobic surface. (Forbes 2008)
Velcro:
Burdock is the common name for plants of the genus Arctium. The burdock itself is often considered a weed and is unwelcome by most humans. The aspect of these plants that I will be focusing on is the prickly heads of the plant that are referred to as burrs. These burrs are typically seedpods or fruits and are covered with protruding hooks. The hooks function in several ways. They may act as a deterrent to some herbivores, while also serving as a mechanism for seed dispersal. The hooks attach to the fur of animals and the burr is transported to another location. Some small spiders also use the burrs to spin webs in between the protrusions. In 1941 a Swiss engineer named George de Mestral had returned home from a walk in the countryside with his dog. He noticed that the seedpods from burdock plants were stuck to his dogs fur, and his pants as well. Fascinated by this observation, he examined a seedpod under the microscope. He noticed that the spines surrounding the seedpod were not straight, but barbed hooks that efficiently adhered to many materials. The burrs inspired Mestral to develop a “hook and loop” bonding system. After nearly a decade of experimentation and attempts at manufacturing, his product, “Velcro”, was born. In 1955 it became patented (Hansen, 2002). Mestral settled on a two-strip system made of nylon. One strip consists of many small hooks, and the other consists of many small loops. We the strips are placed together the hooks grab onto the loops and the strips stick together. If enough force is applied then the strips can be separated. Velcro.com makes it very clear that there are other brands of hook and loop fastener products, but Velcro is the “premier and original product”. Upon its introduction into the marketplace Velcro struggled; it wasn’t until the 1960s when NASA adopted the product for their Apollo missions. Astronauts would use it to secure equipment from floating away in low/zero gravity. Since then, Velcro has been incorporated anywhere and everywhere, from shoes, to pants, to toys, to the Armed Forces, and beyond (Suddath, 2010). A quick glance your room will surely land your eyes on some Velcro. For more on the evolution of the uses of Velcro, see Claire Suddath’s article from TIME magazine.
Biology:
Symbiosis is the co-existence between two or more different organisms where one or more may benefit from the relationship. Sym comes from the Greek origin meaning together, and bios meaning life. Some symbiotic relationships are mutually beneficial, where all parties benefit, others are harmful, where one benefits and one is harmed by the interaction. For example, insect pollinators receive vital nutrients from their plant partners. The plant receives a pollen carrier (the insect) and the pollinator receives vital nutrients from the plants nectar.
Bioinspired Product:
Using the idea of symbiosis the town of Kaluborg, Denmark are using the extra resources and byproducts of different companies for other processes so nothing goes unused or wasted. For example, if one company creates extra heat from their production, the excess heat is used to head homes, or fish farming. If an industrial park creates sulfur as their byproduct, it is given to other companies near by that can utilize it as a source for production. The outcome is reduced consumption of resources and a significant reduction in environmental strain.
Process:
The community of Kalundborg were finding that their largely industrial companies were creating a large amount of waste and by products. The community found that most of the waste and by products being created could be used by other companies in the area, reducing waste and pollution. I believe the companies decided to work together to not only reduce waste, but also save money, since some of their own ingredients needed for production were being "donated" by another company, and did not need to be purchased.
Lotusan
One of the key adaptations plants acquired that allowed for the colonization of land is the incorporation of cuticle on the upper and lower epidermis of most land plants. Cuticle consists of polyester and wax polymers and creates a barrier to prevent desiccation. These lipids are hydrophobic by there very nature. The leaves of some plants like the lotus (Nelumbo nucifera) exhibit what is referred to as “superhydrophobicity,” in that water falling on these surfaces beads to near-perfect spheres and rolls off the surface taking foreign material (i.e. dirt) with it. The secret behind superhydrophobicity has been recently discovered. It has to do not with the chemical composition of the surface alone, but rather the micro- and nano- topography of the surface. Superhydrophobic surfaces like the lotus leaf are covered with microscopic bumps and those bumps are covered with even smaller hair-like projections. Together, this topography keeps less of the water actually in contact with the leaf surface, and the cohesive properties of the water take over forming the droplets. Any agitation, such as a breeze, will cause the droplets to roll off the leaf taking any dirt that is present on the surface with it. It does this because the dirt has a stronger adhesive attraction to the passing water than it does to the superhydrophobic surface. (Forbes 2008)
Velcro:
Burdock is the common name for plants of the genus Arctium. The burdock itself is often considered a weed and is unwelcome by most humans. The aspect of these plants that I will be focusing on is the prickly heads of the plant that are referred to as burrs. These burrs are typically seedpods or fruits and are covered with protruding hooks. The hooks function in several ways. They may act as a deterrent to some herbivores, while also serving as a mechanism for seed dispersal. The hooks attach to the fur of animals and the burr is transported to another location. Some small spiders also use the burrs to spin webs in between the protrusions. In 1941 a Swiss engineer named George de Mestral had returned home from a walk in the countryside with his dog. He noticed that the seedpods from burdock plants were stuck to his dogs fur, and his pants as well. Fascinated by this observation, he examined a seedpod under the microscope. He noticed that the spines surrounding the seedpod were not straight, but barbed hooks that efficiently adhered to many materials. The burrs inspired Mestral to develop a “hook and loop” bonding system. After nearly a decade of experimentation and attempts at manufacturing, his product, “Velcro”, was born. In 1955 it became patented (Hansen, 2002). Mestral settled on a two-strip system made of nylon. One strip consists of many small hooks, and the other consists of many small loops. We the strips are placed together the hooks grab onto the loops and the strips stick together. If enough force is applied then the strips can be separated. Velcro.com makes it very clear that there are other brands of hook and loop fastener products, but Velcro is the “premier and original product”. Upon its introduction into the marketplace Velcro struggled; it wasn’t until the 1960s when NASA adopted the product for their Apollo missions. Astronauts would use it to secure equipment from floating away in low/zero gravity. Since then, Velcro has been incorporated anywhere and everywhere, from shoes, to pants, to toys, to the Armed Forces, and beyond (Suddath, 2010). A quick glance your room will surely land your eyes on some Velcro. For more on the evolution of the uses of Velcro, see Claire Suddath’s article from TIME magazine.

|
|
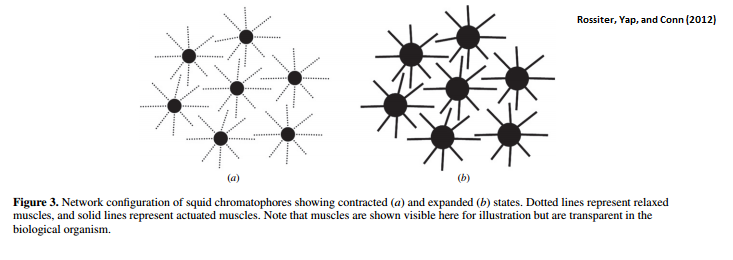
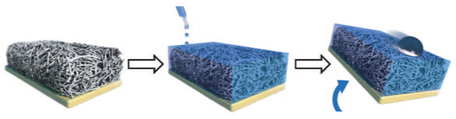
Chromophorism:Several animals have special cells called “chromatophores” that have the ability to express different levels of pigment, and thus, appear to change color. Some examples of groups of animals in which some have chromatophores are cephalopods (such as the cuttlefish), several fish (such as the zebrafish), reptiles, and amphibians. Cephalopod chromataphore cells have a structure called a sacculus in the center that contains pigment granules. The sacculus is surrounded by radial muscles. When the chromataphore is activated, the nerve signals cause these radial muscles to contract. This contraction causes the sacculus to expand, exposing more pigment1. The melanophores in zebrafish accomplish roughly the same task, but are a little different. Within a melanophore cell, there is a small reservoir of pigmented fluid. When the melanophore is activated, intracellular muscle interactions cause the pigment to be moved towards the surface of the skin cell and spread out. This causes the cells to take on a significantly different look1.There are many applications in which “smart” clothing could be used (clothing that could change color). However, there aren’t many safe technologies that exist that are safe on human skin2, and furthermore, most capabilities we have for producing color changing products do not change very fast1, at least in comparison to how fast chromataphores can change the color of a skin cell in a cuttlefish or zebrafish. Scientists designed their own artificial chromataphores using electricity as the signal for a pigment to change color. In the design in which they tried to mimic a cuttlefish chromataphore, they used an electro-active polymer that can expand and contract based on electroactivity. When connected to a copper plate, when it received a charge it contracted. The scientists designed a sacculus and used this electro-active polymer to mimic the radial muscles of the cuttlefish chromataphore. After perfecting this, they scaled up the operation to include multiple structures in one area that could expand in unison. When electricity was passed through the electro-active polymers, all 3 black spots (pigment in the artificial sacculus) expanded, causing that area to look darker from a distance). It is proposed that as this technology develops, this can be used to create materials that can change color very quickly, as both methods respond very quickly in comparison to other technologies (including the speed of LED light’s changing).1 It is speculated the military would be interested in using this technology for camouflaging3 and other “smart clothing”2. It is still under development and is not in any products like this yet.I feel that this research could lead to some very interesting “smart clothing”. Camouflage that could quickly adapt more precisely to a change in surroundings would give an edge to any infantry or vehicle that would utilize it. Outside of military applications, I don’t see this being a major win for society outside of it inspiring some cool clothing, which is something that isn’t a top priority for society, in my opinion. One of the papers even mentioned it inspiring invisibility cloaks, but that thought in real life doesn’t actually comfort me very much. However, there could be some other creative uses for this technology out there.
Shrilk:
Society has been working diligently to discover natural products that can work in a consumer world. It wasn’t until recently they discovered a product that was cheap to produce, biodegradable and biodecompatible: chitin. The strength, toughness and laminar design of chitin makes it a desirable product for any industry, but because it is the second most abundant polymer on Earth, chitin provides a cheap framework for manufacturing bioinspired products. This complex was first discovered in anthropoid cuticles because of the unique structure. The composite material consists of layers of polysaccharide polymer chitin and protein organized in a laminar, plywood-like structure. It is hard to re-create because of it’s low solubility and it is admired for its ability to vary its properties, from rigid along the insect’s body segments and wings to elastic along its limb joints. Chitin provides insects with extra protection without adding additional bulk or weight.
This bio-inspired material was never designed to solve a problem but merely to make a environmental difference in commercially used products. The Wyss Institute engineered a think, clear film that has the same composition and structure as said cuticle that could be used safety for serving as scaffolding for tissue regeneration. According to Ingber, “It has the potential to be both a solution to some of today’s most critical environmental problems and a stepping stone toward significant medical advances.” This power of chitin lead to the manufacture of shrill: the chitosan:fibroin at 1:2 ratio. Shrilk is composed of fibroin protein from silk and from chitin. The material is similar in strength and toughness to aluminum alloys, but is only half the weight. This material can be can be extracted from shrimp shells meaning it can be produced at a very low cost. Also, shrill can be molded into complex shapes through varying the water to change the stiffness from elastic to rigid. Shrilk is created in two separate phases that can be analyzed alone, or when combined in an organized laminate, allow us to explore their molecular bonding characteristics in detail. Overall, scientists have engineered bioinspired cuticle mimics to prove useful as replacements for plastics in consumer products and for certain medical applications, as chitosan and fibroin are biodegradable, biocompatible, and used in approved clinical products. For instance, labs have fabricated a hollow cylindrial structure by hydrating a previously deposited and micromolded shrilk film to increase its flexibility, rolling this flexible film around a glass capillary tube, and then drying the film to return it to a rigid state. The dry film retained its cylindrical shape after it was removed from the surface of the capillary tube. In this configuration, shrilk could potentially serve as a biocompatible and biodegradable scaffold for small vessel repair or as a nerve conduit given its high biocompatibility.
Hagfish Slime:
Inspiration from Nature:
Hag fish slime sounds to me like some strange cartoon character or something that would be seen on Fear Factor. However, that is not the case! Hagfish (Myxinidae) have an amazing defense mechanism which is to secrete slime when they feel they are in danger. “They produce a slime that results from the mixing of products from two cell types in the slime glands: gland thread cells (GTCs) and gland mucous cells (GMCs). GTCs each produce a single thread that is about 150 mm long in mature cells and 1–3 μm in diameter… Slime threads are a promising model because they are produced in the hagfish slime gland via mechanisms that may be easier to mimic than the complex mechanisms of silk spinning in spiders.” according to Pinto (2014).
The Bioinspired Product:
Scientists are working on duplicating the thread making process in order to create a very durable thread. For this to work they will need to genetically modify bacteria to make the slime proteins and they have hope of this working better than bacteria that have been modified to make silk because the proteins in hagfish slime are smaller than that of silk (McKennan, 20212).
The Problem the Product Can Solve:
Since there are so many different directions this idea can go in, there are many different problems that could be solved. The goal is to create a polymer which is much more ecofriendly by mimicking what we see in nature. There have been discussion of using the threads for clothing, durable plastics, and even tendon replacement in the body.
What Could Push This Technology Forward?
Scientists are still working on finding the best way to produce the slime. There are some problems that need to be considered and how our application of the slime can get around those problems. One of the biggest problems is that the slime itself is unstable. It doesn’t stay in the gel form very long and it tends to form best in sea water rather than fresh water.
Is this a societal win? Is this biomimicry, bioinspiration, or neither?
After hearing from Mr. Ewoldt yesterday I was amazed at the idea of hagfish slime as well as the entire branch of rheology. Creating hagfish slime as an alternative polymer is definitely a societal win in my opinion. We will be using and wasting less human made material by creating a biomaterial. I have to admit, I am a little unsure but I do believe this is bioinspiration. The fact that scientists need to genetically modify bacteria in order to make this work is what leads me to bioinspiration rather than biomimicry.
Shrilk:
Society has been working diligently to discover natural products that can work in a consumer world. It wasn’t until recently they discovered a product that was cheap to produce, biodegradable and biodecompatible: chitin. The strength, toughness and laminar design of chitin makes it a desirable product for any industry, but because it is the second most abundant polymer on Earth, chitin provides a cheap framework for manufacturing bioinspired products. This complex was first discovered in anthropoid cuticles because of the unique structure. The composite material consists of layers of polysaccharide polymer chitin and protein organized in a laminar, plywood-like structure. It is hard to re-create because of it’s low solubility and it is admired for its ability to vary its properties, from rigid along the insect’s body segments and wings to elastic along its limb joints. Chitin provides insects with extra protection without adding additional bulk or weight.
This bio-inspired material was never designed to solve a problem but merely to make a environmental difference in commercially used products. The Wyss Institute engineered a think, clear film that has the same composition and structure as said cuticle that could be used safety for serving as scaffolding for tissue regeneration. According to Ingber, “It has the potential to be both a solution to some of today’s most critical environmental problems and a stepping stone toward significant medical advances.” This power of chitin lead to the manufacture of shrill: the chitosan:fibroin at 1:2 ratio. Shrilk is composed of fibroin protein from silk and from chitin. The material is similar in strength and toughness to aluminum alloys, but is only half the weight. This material can be can be extracted from shrimp shells meaning it can be produced at a very low cost. Also, shrill can be molded into complex shapes through varying the water to change the stiffness from elastic to rigid. Shrilk is created in two separate phases that can be analyzed alone, or when combined in an organized laminate, allow us to explore their molecular bonding characteristics in detail. Overall, scientists have engineered bioinspired cuticle mimics to prove useful as replacements for plastics in consumer products and for certain medical applications, as chitosan and fibroin are biodegradable, biocompatible, and used in approved clinical products. For instance, labs have fabricated a hollow cylindrial structure by hydrating a previously deposited and micromolded shrilk film to increase its flexibility, rolling this flexible film around a glass capillary tube, and then drying the film to return it to a rigid state. The dry film retained its cylindrical shape after it was removed from the surface of the capillary tube. In this configuration, shrilk could potentially serve as a biocompatible and biodegradable scaffold for small vessel repair or as a nerve conduit given its high biocompatibility.
Hagfish Slime:
Inspiration from Nature:
Hag fish slime sounds to me like some strange cartoon character or something that would be seen on Fear Factor. However, that is not the case! Hagfish (Myxinidae) have an amazing defense mechanism which is to secrete slime when they feel they are in danger. “They produce a slime that results from the mixing of products from two cell types in the slime glands: gland thread cells (GTCs) and gland mucous cells (GMCs). GTCs each produce a single thread that is about 150 mm long in mature cells and 1–3 μm in diameter… Slime threads are a promising model because they are produced in the hagfish slime gland via mechanisms that may be easier to mimic than the complex mechanisms of silk spinning in spiders.” according to Pinto (2014).
The Bioinspired Product:
Scientists are working on duplicating the thread making process in order to create a very durable thread. For this to work they will need to genetically modify bacteria to make the slime proteins and they have hope of this working better than bacteria that have been modified to make silk because the proteins in hagfish slime are smaller than that of silk (McKennan, 20212).
The Problem the Product Can Solve:
Since there are so many different directions this idea can go in, there are many different problems that could be solved. The goal is to create a polymer which is much more ecofriendly by mimicking what we see in nature. There have been discussion of using the threads for clothing, durable plastics, and even tendon replacement in the body.
What Could Push This Technology Forward?
Scientists are still working on finding the best way to produce the slime. There are some problems that need to be considered and how our application of the slime can get around those problems. One of the biggest problems is that the slime itself is unstable. It doesn’t stay in the gel form very long and it tends to form best in sea water rather than fresh water.
Is this a societal win? Is this biomimicry, bioinspiration, or neither?
After hearing from Mr. Ewoldt yesterday I was amazed at the idea of hagfish slime as well as the entire branch of rheology. Creating hagfish slime as an alternative polymer is definitely a societal win in my opinion. We will be using and wasting less human made material by creating a biomaterial. I have to admit, I am a little unsure but I do believe this is bioinspiration. The fact that scientists need to genetically modify bacteria in order to make this work is what leads me to bioinspiration rather than biomimicry.

|

|
SLIPS (Slippery Liquid Infused Porous Surface):Last week I wrote about lotus-inspired self-cleaning, superhdrophobic surfaces created by products such as “Ultra Ever Dry” and “Lotusan.” Those products use nanotopography to reduce the amount of surface area of the liquid actually in contact with the surface, thus creating a type of “air-shield” around the treated surface that causes water to roll off. I was thoroughly convinced that it was the greatest invention ever and marveled at all the potential applications for those products. This week’s research begins by pointing out some of the problems with the lotus-inspired superhydrophobic surfaces- namely:
The potential applications for this technology are vast. Some possible applications the authors mention include:
- It is not adequately oleophobic
- Low durability
- Inability to self-heal
- Opacity of the product
- High production costs
The potential applications for this technology are vast. Some possible applications the authors mention include:
- fluid handling and transportation (high pressure pipelines, storage/ delivery tanks)
- medicine (blood components can’t stick to theses surfaces)
- self-cleaning and anti-fouling materials operating in extreme environments
RHex
RHex seems to move around like a spunky little puppy and is the result of a multi-university collaboration beginning over a decade ago. RHex is a power autonomous, 6-legged robot that demonstrates extraordinary mobility over rough terrain (an ability few other robots possess). Inspired by the mechanics of arthropod motion, it can climb through vegetation, rock fields, mud, sand, snow, railroad tracks, 60% inclines. Other motions achieved by RHex include stair climbing, swimming, flipping and bounding. It has a sealed body which allows it to operate in wet and swampy conditions. The robot has a rigid body with compliant legs that rotate full circle and have one motor located at each hip. (Compliant means that it modifies its motions in a way to minimize external forces.) It can reach speeds faster than one body length per second.
Image from: http://kodlab.seas.upenn.edu/RHex/ResearchRHex
This video shows how RHex can navigate rough terrain: RHex Rough-Terrain Robot
This video shows a leaping RHex: Leaping with RHex
At first glance, RHex may not resemble a cockroach, but its design was inspired by cockroach locomotion. In 1998, Martin Buehler, a roboticist at McGill University took note of a video by Robert Full, a biologist, showing how a cockroach navigates a bumpy surface with little loss in performance. Using paper clips and an eraser, Buehler roughed out an initial design of a robot based on principles of the cockroach. This was the beginning of what would become RHex. Saranli, Buehler & Koditschek (2001) comment that RHex bounces along in the same manner as a cockroach without leaving the ground, adopting the alternating tripod gait. Embedded in the legs are similar mass-spring dynamics as found in the majority of legged animals during running (Campbell & Buehler, 2003). In a TEDTalk entitled “Robots inspired by cockroach ingenuity”, Robert Full discusses the inspiration for this robot. Animal legs appear to be self-stabilizing, using springy legs. Whether you look at a human, a crab, a kangaroo or a cockroach, he says the “relative leg stiffness of that spring is the same for everything we’ve seen so far.” This was the inspiration to build robots with springy legs to increase maneuverability and build the ability to self-stabilize into the structure itself. He emphasizes in the video that RHex can’t see or feel and has no brain. ”It’s just working with a tuned mechanical system, with very simple parts, but inspired from the fundamental dynamics of the animal.”
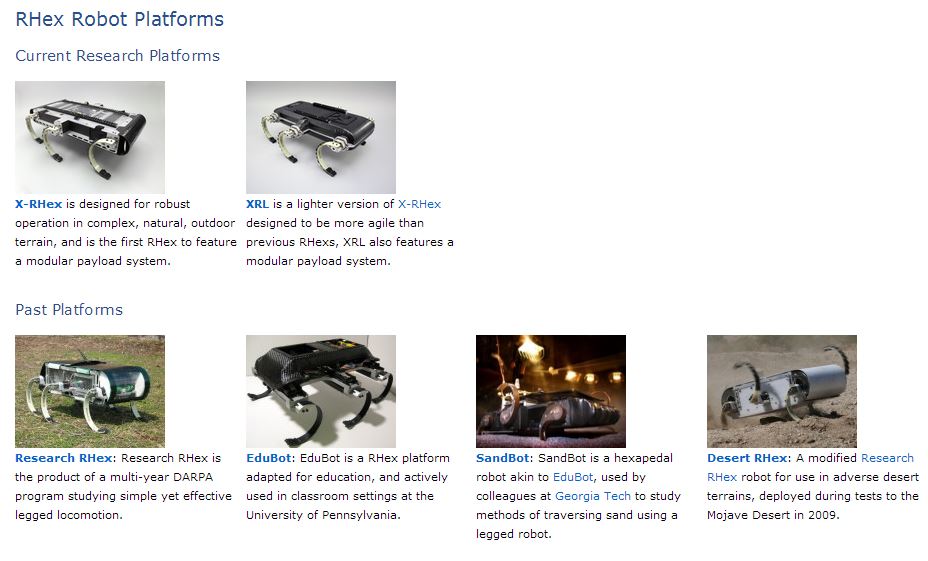
Newer versions of HRex have focused on providing more autonomy, additional sensors and greater dexterity.
Below are some of the different versions of RHex from http://kodlab.seas.upenn.edu/RHex/Home?from=RHex.RHex.
RHex seems to move around like a spunky little puppy and is the result of a multi-university collaboration beginning over a decade ago. RHex is a power autonomous, 6-legged robot that demonstrates extraordinary mobility over rough terrain (an ability few other robots possess). Inspired by the mechanics of arthropod motion, it can climb through vegetation, rock fields, mud, sand, snow, railroad tracks, 60% inclines. Other motions achieved by RHex include stair climbing, swimming, flipping and bounding. It has a sealed body which allows it to operate in wet and swampy conditions. The robot has a rigid body with compliant legs that rotate full circle and have one motor located at each hip. (Compliant means that it modifies its motions in a way to minimize external forces.) It can reach speeds faster than one body length per second.
Image from: http://kodlab.seas.upenn.edu/RHex/ResearchRHex
This video shows how RHex can navigate rough terrain: RHex Rough-Terrain Robot
This video shows a leaping RHex: Leaping with RHex
At first glance, RHex may not resemble a cockroach, but its design was inspired by cockroach locomotion. In 1998, Martin Buehler, a roboticist at McGill University took note of a video by Robert Full, a biologist, showing how a cockroach navigates a bumpy surface with little loss in performance. Using paper clips and an eraser, Buehler roughed out an initial design of a robot based on principles of the cockroach. This was the beginning of what would become RHex. Saranli, Buehler & Koditschek (2001) comment that RHex bounces along in the same manner as a cockroach without leaving the ground, adopting the alternating tripod gait. Embedded in the legs are similar mass-spring dynamics as found in the majority of legged animals during running (Campbell & Buehler, 2003). In a TEDTalk entitled “Robots inspired by cockroach ingenuity”, Robert Full discusses the inspiration for this robot. Animal legs appear to be self-stabilizing, using springy legs. Whether you look at a human, a crab, a kangaroo or a cockroach, he says the “relative leg stiffness of that spring is the same for everything we’ve seen so far.” This was the inspiration to build robots with springy legs to increase maneuverability and build the ability to self-stabilize into the structure itself. He emphasizes in the video that RHex can’t see or feel and has no brain. ”It’s just working with a tuned mechanical system, with very simple parts, but inspired from the fundamental dynamics of the animal.”
Newer versions of HRex have focused on providing more autonomy, additional sensors and greater dexterity.
Below are some of the different versions of RHex from http://kodlab.seas.upenn.edu/RHex/Home?from=RHex.RHex.

RoboBee
Inspiraton fromNature:
The inspiration for this miniature robot was derived from both bee flight mechanics and bee "HIVE' behavior. The team hoped to emulate not only the flight mechanics of the bee but also fine-tuned communicaton between multiple roboees by developing mini-sensors capable of processing information from multiple robots to achieve coordinated movements similar to "native" bee colony behaviors. Recent environmental concerns regarding "colony-collapse disorder," that is, the threat to the native North American honeybee population, has sparked much research into the field of artifiicial pollnation to avoid an economic disaster in the agricultural arena.
(Image: Harvard, http://robobees.seas.harvard.edu/)
Description of the bioinspired robot:
These miniature Robots were first sucesssfully produced by Professor Robert J. Wood ath the Wyss Institute for Biologically Inspired Engineering at Harvard University. The robots were inspired by bee flight mechanics AND bee colony behavior. The development of the robobee was part of an engineering challenge to "spur" advances in small-scale robotics and development new forms of compact, "high-energy" power sources and inspire innovations in what the Harvard team calls "ultra-low-power computing and electronic “smart” sensors. Finally, the bees will be able to communicate with each other which will allow coordination of multiple "robobees" to mimic their own hive behaviors. The development of the Robobee included three major categories:
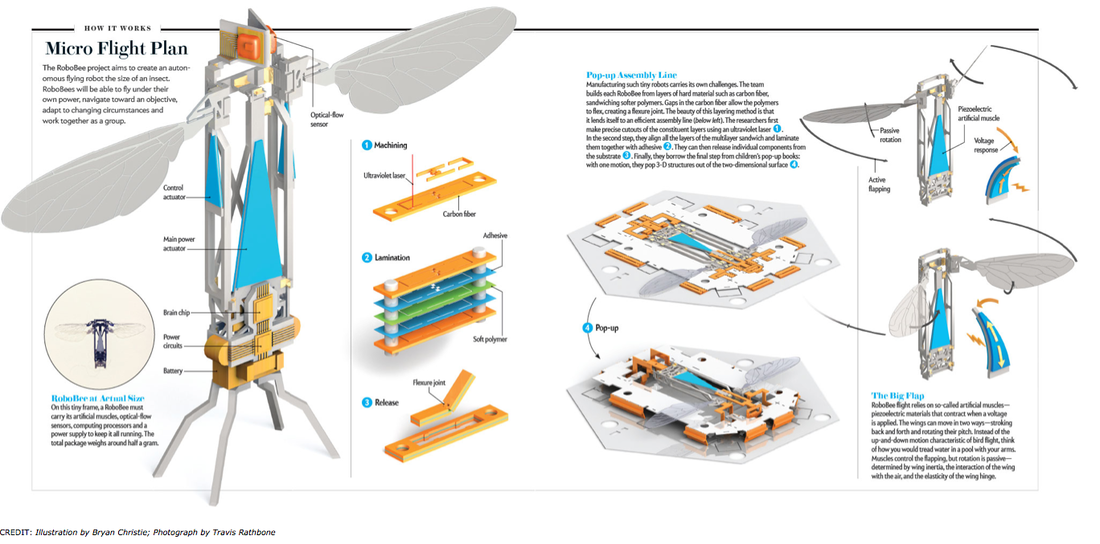
The initial goal of the project was to develop a mini-robot that could supplement the pollination process normally performed by bees. Another goal of the project was to take advantage of "self-organizing, pop-up" assembly methods so decrease the energy input requirements in the mass-production of the robobee. (See Video clip on self-assembly). The body plan was an evolution of design. The team need to develop an artificial muscle to mimic the fast flapping action of a true wing. The heavy rotors present on(spinning) wings become an issue the smaller an object becomes due to friction forces. Frictionbegin to dominate over volume-related forces such as gravity and inertia. In other words, the amount of material needed to create the spiinning wing like the common robohelicopters, are too heavy for something as small as the robobee. So the develop of artificial muscle material, something flexible that snaps back into shape. The artificial muscle that the team developed is made of piezoelectric materials that contract when you apply a voltage across their thickness. The flapping over the spinning was key to developing a MINI-ROBOT that could overcome the huge forces of friction (high SURFACE TO VOLUME RATIO) of the surrounding air.
Is the new bioinspired robot a societal win in your opinion?
This is a tough call. If you assume that all of the native pollinators are extinct, an economic collapse is looming with no other ecological options, than yes, this is a societal win. But I am not in favor of replacing native populations anytime soon. From an ENVIRONMENTAL viewpoint, not strictly ECONOMIC, I believe it is of critical importance the we humans focus more on the recovery of the native bee populations. It is impossible to fully understand the complexity of the bee behavior. Just like in any experiment, we can NEVER know all of the variables involved because we can't possible know imagine all of them. So, I think this technology is super cool and has many applications, but I don't believe we should ever consider replacing ANY species. Here are some other applications of the ROBOBEE not mentioned above:
For you classrooms, here is a PDF link for instructions on how your students can build a ROBOBEE:
Cool Fun YOUTUBE VIDEO explanatio of ROBOBEES sure to be enjoyed by your students.
Sources:
"Robobees." Robobees. Harvard Universisty, 2014. Web. 04 July 2014. <http://robobees.seas.harvard.edu/>.
"RoboBee." Wikipedia. Wikimedia Foundation, 21 May 2014. Web. 02 July 2014. <http://en.wikipedia.org/wiki/RoboBee>.
Schwartz, Ariel. "This Robotic Bee Just Took Flight, To Pollinate Crops And (Maybe) Spy On You." Co.Exist. Fast Company & Inc, May 2013. Web. 02 July 2014. <http://www.fastcoexist.com/1682095/this-robotic-bee-just-took-flight-to-pollinate-crops-and-maybe-spy-on-you>.
Wood, Robert, Radhika Nagpal, and Gu-Yeon Wei. "Flight of the Robobees." Scientific American 308.3 (2013): 60-65.
STRIDER
Description of the bioinspired robot;
The bioinspired robot was created to mimic the water strider organism. The robot that was created uses the idea of surface tension to stay above water (nanolab, nd). According to nanolab (nd), they wanted to design a robot that was powerful and also had the ability to maneuver easily. They have also perfected the ability for the robot to mimic jumping in the same sense as the actual water strider (Woods, 2012). Woods (2012) argues that this ability will make the new robot more swift when it leaps.
Description of the inspiration from nature:
The inspiration for this robot was the water strider. It is a small, mosquito size bug that is able to walk on water (Woods, 2012). According to Dickinson (2003), water striders have hairy legs that want to push the animal down. However, their feet allow the surface tension to push the animal upward (Dickinson, 2003). The water strider creates ripples on the water’s surface that allows them to propel themselves forward (Dickinson, 2003). Another way that they are able to walk/run on water is that the hair on their legs are able to repel water (Water Strider, 2014). According to Module 3’s Lesson, their legs are also hydrophobic which means that they don’t like water which helps propel themselves forward.
Description of the process that led to the robot
After doing research, there have been many prototypes before creating a water strider. From what I have found, there have been three prototypes. According to the nanolab website (nd), the third prototype water strider robot has footpads that resemble the coils on a gas stovetop. Other prototypes according to the nanolab website (nd), are the Moving Water Strider, Tetherless Water Strider, and Peizoelectric Actuator Based Water Strider.
Is the new bioinspired robot a societal win in your opinion?
I don’t know if I would consider this robot a societal win. I do believe that this robot can be very beneficial. Scientifically, I can potentially see many opportunities to use the robot. The robot would be small and very agile, so it could be used in many contexts with that. My imagination always diverts toward spyware. However for society, I don’t know where this would fit in. The idea of a small robot reminds me of the robot that is small like a mosquito, bites you, and is able to take blood samples and test your blood. I don’t think that society needs the added worry of something else out there that has the potential to do that.
References
(2014). Water Strider. Retrieved from: http://www.nwf.org/wildlife/wildlife-library/invertebrates/water-strider.aspx
(nd). Common water strider. Retrieved from:http://www.fcps.edu/islandcreekes/ecology/common_water_strider.htm
(nd). Water strider. Retrieved from: http://nanolab.me.cmu.edu/projects/waterstrider/
Dickinson, M. (2003). How to walk on water. Nature. 424(7).
Woods, M. (2012). The first robot that mimics the water striders jumping abilities. ACS News Service Weekly pressPac. Retrieved from: http://www.fcps.edu/islandcreekes/ecology/common_water_strider.htm
Photo References:
Photo A: https://machineslikeus.com/news/robot-mimics-water-striders-jumping-abilities
Photos C & D: http://nanolab.me.cmu.edu/projects/waterstrider/
Inspiraton fromNature:
The inspiration for this miniature robot was derived from both bee flight mechanics and bee "HIVE' behavior. The team hoped to emulate not only the flight mechanics of the bee but also fine-tuned communicaton between multiple roboees by developing mini-sensors capable of processing information from multiple robots to achieve coordinated movements similar to "native" bee colony behaviors. Recent environmental concerns regarding "colony-collapse disorder," that is, the threat to the native North American honeybee population, has sparked much research into the field of artifiicial pollnation to avoid an economic disaster in the agricultural arena.
(Image: Harvard, http://robobees.seas.harvard.edu/)
Description of the bioinspired robot:
These miniature Robots were first sucesssfully produced by Professor Robert J. Wood ath the Wyss Institute for Biologically Inspired Engineering at Harvard University. The robots were inspired by bee flight mechanics AND bee colony behavior. The development of the robobee was part of an engineering challenge to "spur" advances in small-scale robotics and development new forms of compact, "high-energy" power sources and inspire innovations in what the Harvard team calls "ultra-low-power computing and electronic “smart” sensors. Finally, the bees will be able to communicate with each other which will allow coordination of multiple "robobees" to mimic their own hive behaviors. The development of the Robobee included three major categories:
- Body:The materials used for the body needed to be light weight, but meet the aerobic feats of a bee. Also, autonomous flight requires COMPACT, ghih energy power sources that are integrated within the body of the machine. You will notice that the shape of the ROBOBEE (not to be confused with the ROBOFLY that is published on the web) has evolved from a helicopter-like to a more bee-like shape (See Figure Bel
- Brain:The biggest challenge to the development of Colony Behavior withing the robobee population is to develop minature SMART SENSORS, like the ones in cars that prevent bumping into one another. The same technology is applied here but miniaturizing the mulitple "suite" of sensors to act like an artificial brain is still being researched. This inspired project provides insight for developing sensory pathways that can not only be used in bee -behavior technology but also in human disorders such as Parkinson's or Alzheimer's Disease. See Figure below for "Smart Technolgoy').
- ColonyThe Artificial Intelligence mentioned above will be extended to allow machines to talk to each other and the "hive." Similar to cell phone technology, the computer programming will allow the bees to recognize the difference between "global" and "local" signals to mimic the bees ability to identify the location of food sources and find their way back to the hive.
The initial goal of the project was to develop a mini-robot that could supplement the pollination process normally performed by bees. Another goal of the project was to take advantage of "self-organizing, pop-up" assembly methods so decrease the energy input requirements in the mass-production of the robobee. (See Video clip on self-assembly). The body plan was an evolution of design. The team need to develop an artificial muscle to mimic the fast flapping action of a true wing. The heavy rotors present on(spinning) wings become an issue the smaller an object becomes due to friction forces. Frictionbegin to dominate over volume-related forces such as gravity and inertia. In other words, the amount of material needed to create the spiinning wing like the common robohelicopters, are too heavy for something as small as the robobee. So the develop of artificial muscle material, something flexible that snaps back into shape. The artificial muscle that the team developed is made of piezoelectric materials that contract when you apply a voltage across their thickness. The flapping over the spinning was key to developing a MINI-ROBOT that could overcome the huge forces of friction (high SURFACE TO VOLUME RATIO) of the surrounding air.
Is the new bioinspired robot a societal win in your opinion?
This is a tough call. If you assume that all of the native pollinators are extinct, an economic collapse is looming with no other ecological options, than yes, this is a societal win. But I am not in favor of replacing native populations anytime soon. From an ENVIRONMENTAL viewpoint, not strictly ECONOMIC, I believe it is of critical importance the we humans focus more on the recovery of the native bee populations. It is impossible to fully understand the complexity of the bee behavior. Just like in any experiment, we can NEVER know all of the variables involved because we can't possible know imagine all of them. So, I think this technology is super cool and has many applications, but I don't believe we should ever consider replacing ANY species. Here are some other applications of the ROBOBEE not mentioned above:
- autonomously pollinating a field of crops;
- search and rescue (e.g., in the aftermath of a natural disaster);
- hazardous environment exploration;
- military surveillance; (although some people are against this one!!)
- high resolution weather and climate mapping; and
- traffic monitoring.
For you classrooms, here is a PDF link for instructions on how your students can build a ROBOBEE:
Cool Fun YOUTUBE VIDEO explanatio of ROBOBEES sure to be enjoyed by your students.
Sources:
"Robobees." Robobees. Harvard Universisty, 2014. Web. 04 July 2014. <http://robobees.seas.harvard.edu/>.
"RoboBee." Wikipedia. Wikimedia Foundation, 21 May 2014. Web. 02 July 2014. <http://en.wikipedia.org/wiki/RoboBee>.
Schwartz, Ariel. "This Robotic Bee Just Took Flight, To Pollinate Crops And (Maybe) Spy On You." Co.Exist. Fast Company & Inc, May 2013. Web. 02 July 2014. <http://www.fastcoexist.com/1682095/this-robotic-bee-just-took-flight-to-pollinate-crops-and-maybe-spy-on-you>.
Wood, Robert, Radhika Nagpal, and Gu-Yeon Wei. "Flight of the Robobees." Scientific American 308.3 (2013): 60-65.
STRIDER
Description of the bioinspired robot;
The bioinspired robot was created to mimic the water strider organism. The robot that was created uses the idea of surface tension to stay above water (nanolab, nd). According to nanolab (nd), they wanted to design a robot that was powerful and also had the ability to maneuver easily. They have also perfected the ability for the robot to mimic jumping in the same sense as the actual water strider (Woods, 2012). Woods (2012) argues that this ability will make the new robot more swift when it leaps.
Description of the inspiration from nature:
The inspiration for this robot was the water strider. It is a small, mosquito size bug that is able to walk on water (Woods, 2012). According to Dickinson (2003), water striders have hairy legs that want to push the animal down. However, their feet allow the surface tension to push the animal upward (Dickinson, 2003). The water strider creates ripples on the water’s surface that allows them to propel themselves forward (Dickinson, 2003). Another way that they are able to walk/run on water is that the hair on their legs are able to repel water (Water Strider, 2014). According to Module 3’s Lesson, their legs are also hydrophobic which means that they don’t like water which helps propel themselves forward.
Description of the process that led to the robot
After doing research, there have been many prototypes before creating a water strider. From what I have found, there have been three prototypes. According to the nanolab website (nd), the third prototype water strider robot has footpads that resemble the coils on a gas stovetop. Other prototypes according to the nanolab website (nd), are the Moving Water Strider, Tetherless Water Strider, and Peizoelectric Actuator Based Water Strider.
Is the new bioinspired robot a societal win in your opinion?
I don’t know if I would consider this robot a societal win. I do believe that this robot can be very beneficial. Scientifically, I can potentially see many opportunities to use the robot. The robot would be small and very agile, so it could be used in many contexts with that. My imagination always diverts toward spyware. However for society, I don’t know where this would fit in. The idea of a small robot reminds me of the robot that is small like a mosquito, bites you, and is able to take blood samples and test your blood. I don’t think that society needs the added worry of something else out there that has the potential to do that.
References
(2014). Water Strider. Retrieved from: http://www.nwf.org/wildlife/wildlife-library/invertebrates/water-strider.aspx
(nd). Common water strider. Retrieved from:http://www.fcps.edu/islandcreekes/ecology/common_water_strider.htm
(nd). Water strider. Retrieved from: http://nanolab.me.cmu.edu/projects/waterstrider/
Dickinson, M. (2003). How to walk on water. Nature. 424(7).
Woods, M. (2012). The first robot that mimics the water striders jumping abilities. ACS News Service Weekly pressPac. Retrieved from: http://www.fcps.edu/islandcreekes/ecology/common_water_strider.htm
Photo References:
Photo A: https://machineslikeus.com/news/robot-mimics-water-striders-jumping-abilities
Photos C & D: http://nanolab.me.cmu.edu/projects/waterstrider/


Bioluminescence
I have two options for this week’s introductory video. The first is a 4 min. bit from a National Geographic episode about finding Giant Squid. The video they’ve captured of bioluminescence is incredible.
http://www.youtube.com/watch?v=9HXXQBz6Vv0
This is a 12 min. TED talk by marine biologist Edith Widder titled “The Weird and Wonderful World of Bioluminescence.”
https://www.ted.com/talks/edith_widder_the_weird_and_wonderful_world_of_bioluminescence
Background
As the name implies and the videos demonstrate, bioluminescence is light generated by a living organism. This light is generated via chemical reactions within the organism. Bioluminescence occurs in a wide diversity of organism from singled cell dinoflagellates and bacteria to vertebrates such as fish and squid. The trait has evolved independently many times as is indicated by the several distinct bioluminescent mechanism found in different organisms (Haddock et al 2011). Despite the great diversity of organisms that create light, almost all are found in marine ecosystems.
In 2010 Theo Sanderson, a geneticist at the Wellcome Trust Sanger Institute, set off with his colleagues to try to induce bioluminescence in E. coli. They transferred a gene from bioluminescent bacteria that live symbiotically in squid into E. coli. His team as well as other teams working on bioluminescence focused their studies on the reaction between luciferin and luciferase, the protein and enzyme that react to create the characteristic glow of fireflies (and some other organisms). A major stumbling block in the history of synthetic bioluminescence has been researchers’ inability to create and/or recycle luciferin. Most engineered organisms required the addition of luciferin, which kept the process cost prohibitive and not commercially viable.
Bioglow
In 2010 Sanderson remarked, “We imagined that perhaps in the future, rather than erecting streetlights, people might be able to plant glowing trees.” (Schleeter 2013). In part through the help of a very successful Kickstarter campaign, the dream is very close to reality. Just this year, small bioluminescent plants, dubbed Starlight Avatars, have gone on sale to the public by a company called Bioglow.
Check out the video here:
http://blog.suny.edu/2014/03/future-cities-lit-by-beautiful-bioluminescent-trees/
These plants are fully autonomous, in that they do not require the plant be fed luciferin. The light produced is very dim, though. The researcher I mentioned before, Theo Sanderson, is not a part of Bioglow, but he did wrote a very informative blog post about what is different about the Starlight Avatar, and it’s limitations: http://splasho.com/blog/. Basically, the Bioglow group has tweaked a few DNA segments in hopes of ramping up the expression of the luciferin/ luciferase combo. There still are many unknown limiting factors that need to be identified and worked around before the dream of usable biological light becomes a reality.
I think engineering bioluminescent organisms could be a societal win, with some practical applications. The real draw of bioluminescence, natural or engineered, is in its stunning beauty and the wonder that it induces in us.
References:
Haddock, S.H.D.; McDougall, C.M.; Case, J.F. "The Bioluminescence Web Page", http://biolum.eemb.ucsb.edu/ (created 1997; updated 2011; accessed 07/17/14).
Morgan, M. (2014). Future Cities Lit by Beautiful Bioluminescent Trees. Retrieved from:
http://blog.suny.edu/2014/03/future-cities-lit-by-beautiful-bioluminescent-trees/
Sanderson, T. (2014). Crowd-funding Avatar? http://splasho.com/blog/
Schleeter , R. (2013) Everlasting Light. Retrieved from:
http://education.nationalgeographic.com/education/news/everlasting-light/?ar_a=1
Crickethair Sensor
On the abdomen of crickets are tiny sensitive hairs called cerci. Each cercus is about 1 cm long and is covered in 500 to 750 filiform mechanosensory hairs. The function of the cerci is for sensory and the detection of predators. The air current that flows past the hairs carries information about the location of predators and which direction they are moving. The nerves at the end hairs take in the information about the current and send it to the brain for processing.
Using the cerci of crickets for bioinspiration, scientists at the University of Twente have created a new kind of camera capable of imaging entire flow patterns, rather than focusing on a single point. Like the cricket’s cerci, the camera contains numerous hairs. However these hairs are created out of epoxy to make them flexible. The hairs move on top of a suspended plate, the movements of the hairs are measured. By using an entire field of fine hairs it is possible to identify patterns of flow or change in the area being observed.
Currently scientists are using this technology to uncover hidden signals. The hairs can be used to amplify the weak signal by a factor of 25. Similar to using the hairs to measure movement, as the small hairs change directions, the flow patterns can be measured, and turned into a signal.
BOIDS and other computer simulations
Technology / Biology/ Inspiration behind it for the programs:
BOIDS refers to a computer program that simulates the flocking behavior of birds. It was invented by a man named Craig Reynolds and it is important to provide some background on the inventor. Craig Reynolds writes software that attempts to understand nature, particularly complex natural phenomenon. One of his original programs was simulating the group behavior or flocking nature of birds. The program controls the actions of the animals in a virtual world1. Here is Craig Reynolds:
The original idea was designed in 1986 and in 1987, Craig Reynolds published a paper regarding his work. No one had included the aggregrate motion of animals such as flocks of birds, herds on animals, or schools of fish, in a computer animation before. Rather than scripting the paths of each individual animal, the flock is part of a particle system and each 'simulated bird' is a particle. Because of this, each bird is considered independent as it navigates the course and chooses its own direction2. The individual bird moves based on three steering behaviors - separation, alignment, and cohesion. Separation is the ability to steer to avoid crowding around other birds. Alignment refers to the steering towards the average heading of other birds. Cohesion involves steering to move toward the average position (center of mass) of other birds3. Here are images representing each behavior:
Here is a short clip of the original simulation: Craig Reynolds - Original 1986 Boids simulation. Incidentally, I was wondering where the term BOID came from or what the letters represented. It turns out that is referring to a 'bird like object' but the pronunciation is that of a New Yorker pronouncing the word bird or 'boid'4!
After the Boids model became more well known and understood, improvements were made by other programmers. The Boids simulation is considered an individual based model that captures the global behavior of a large number of organisms. Large flocks can be simulated using algorithmic speed-ups and fast hardware3. I have included a video from 2013 that shows a computer simulation using the Boids algorithm: 3D boids flocking algorithm demo, Unity 3D - w annotations. Another interesting fact is that this program has been used beyond the scientific community. Directors are now using this in their animated films in hollywood. Tim Burton's 'Batman Returns' was the first to use this technology for the bat swarms and penguin flocks (you can see them slightly in this clipBatman Returns: The Penguin's Plan.)
Another computer program based on flocking motion is the FlockMaker: Simulator for Collective Motion. Willa Chen, Naomi Leonard and Susan Marshall created this simulator at Princeton University and it is now the focus of a course at the University. Susan Marshall is a choreographer while Naomi Leonard studies animals groups and robotics. This simulation looks at how humans (some are dancers and some are not) can follow rules for sensing and response in the same way birds or fish follow the rules when they are grouped together. In the same way that animals follow a complex set of rules in their groups, people will be asked to follow different combinations of rules based on their environment, initial conditions, prior knoweldege and other variables. The movement of people will be modeled as particles, similar to the birds in the Boids model5. The original project or flock project was a combination of art and science. In terms of the artistic component, tools for choreography would be created based on designed feedback and interactions. In terms of the scientific component, the goal was to develop insights into things like human crowds, animal groups, and robotic networks. This project looks at the individual movement of dancers /non dancers and how those movements are connected to the group movements6. You can check out some of the performances at this link: http://www.princeton.edu/~flocklogic/7.
The idea behind both of these simulations if the ability of animals to group together in an organized manner. Scientists like Iain Couzin, for example, study animal behavior in order to understand human behavior. It seems like computer models are emerging as the tool to help comprehend this type of behavior. Scientists can learn about migration patterns of animals and what can occur if those patterns are disrupted. Couzin believes the movement of animals is an emergent property or one that is a characteristic of the interaction itself and not of the individual animals7. We also see organisms like the ant that do not appear to have any central control. Their behavior as a group stems from interactions among the individual ants8. There are people who think studying this behavior lead to the movement of information across the Internet (Anternet) and others who think the ant behavior is a bit more unorganized compared to our control of the data on the Internet9. Whether or not this is true, it is obvious that animal behavior is clearly a factor in today's world of technology.
Underwater Vehicles
In this glossary post, I will be discussing how unmanned underwater vehicles are said to be bioinspired. Remotely Operated Vehicles (ROV) and Autonomous Underwater Vehicles (AUV) are what researchers and engineers are designing. An AUV or ROV can be any self-contained vehicle that is able to operate without an external connection (Roper, Sharma, Sutton, & Culverhouse, 2011). These vehicles are small; some are similar in size as normal fish (Healey, Rock, Cody, Miles, & Brown, 1995). However, though they be small, they are indeed mighty. According to Healey, Rock, Cody, Miles, & Brown (1995), they are able to execute positions quickly and efficiently. AUV’s and ROV’s are the alternative to a manned submarine. With a ROV or an AUV, there are now capabilities to apply this technology to our seas and oceans without a lot of cost or manpower (Christi, Papoulias, & Healey, 1990). AUV’s, however, can be difficult to control; later in the paper I will describe what some researchers are trying to accomplish with AUV’s.
Description of the inspiration from nature (make connections to Module 6’s lecture and readings);
The inspiration from nature comes from the water. According to multiple papers that I read, fish were the main inspiration. In Module 6, it discusses how some organisms are able to pick up signals from one another and communicate. Researchers watched schools of fish and determined that if fish were able to be active and able, then so could robots. According to Smith, Hanmann, & Leonar (nd), fish and some other organisms in the water are said to use rules that are simplistic in nature when they are alone. However, when these organisms get into groups, there abilities seem to amplify. Examples of what these organisms can do when they get in bigger groups are as follows: rapid maneuverability, process data quicker, and enhanced decision-making abilities (Smith, Hanmann, & Leonar, nd). Schools of fish are able to maintain cohesion in their group by communicating and watching the fish around them. They are also able to acquire a sense of space between them and others whilst in motion (Smith, Hanmann, & Leonar, nd). According to Roper, Sharma, Sutton, & Culverhouse (2011), the fish that researchers were studying were able to maneuver and outperform some marine locomotion systems. This means that these fish have acquired better and more efficient locomotion skills which are now being transferred to the underwater vehicles.
Lastly, I want to discuss where researchers are hoping to go with this technology. Some researchers are trying to design a better thruster system to apply to the underwater vehicles (Healey, Rock, Cody, Miles, Brown, 1995). Some researchers want to apply an automatic controller that is simple to control but also sophisticated to maneuver in complicated situations (Christi, Papoulias, & Healey, 1990). Finally, some researchers are working on a way to make the underwater vehicles more sustainable by harnessing energy from turbulent flow and redirecting that into a power source (Roper, Sharma, Sutton, & Culverhouse, 2011). All of these ideas are powerful and interesting, however, my hope goes to the last idea. There are many applications for underwater vehicles that can be utilized and having it create a power source through turbulent flow is a win, in my opinion.
References:
Christi, R, Papoulias, F., & Healey, A. (1990). Adaptive sliding mode control of autonomous underwater vehicles in the dive plane. Journal of Oceanic Engineering, 15(3). 152-160.
Healey, A. & Lienard, D. (1993). MULTIVARIABLE SLIDING-MODE CONTROL FOR AUTONOMOUS DIVING AND STEERING OF UNMANNED UNDERWATER VEHICLES. Journal of Oceanic Engineering, 18(3). 327-339.
Healey, A.J., Rock, S.M., Cody, S., Miles, D., & Brown, J.P. (1995). Toward and improved understanding of thruster dynamics for underwater vehicles. Journal of Oceanic Engineering, 20(4). 354-361.
Roper, D., Sharma, S., Sutton, R. & Culverhouse, P. (2011). A review of developments towards biologically inspired propulsion systems for autonomous underwater vehicles. Journal of Engineering For The Maritime Environment.
Smith, T., Hanmann, H., & Leonar, N. (nd). Orientation control of multiple underwater vehicles with symmetry-Breaking potentials. Retrieved from: http://www.princeton.edu/~naomi/cdc1753.pdf.
BioRock (Biorock)
Description of the bioinspired architectural structure or feature.
Biorock uses a low voltage electrical current to seawater to cause dissolved minerals to adhere to a structure. The result of this adhesion is a material that is a composite of brucite and limestone. This composite material has the strength similar to that of concrete. To build a biorock reef, a frame is built from construction grade revar or wire mesh. This structure is then anchored to the sea floor, and a low voltage direct current is applied using an anode. Once the reef structure is in place and minerals begin to coat the surface, divers will go down and transplant fragments from other reefs to the frame. The new reef tends to grow faster than a normal reef. The biorock structures can be built in any size or shape, as long as the structure can survive the location desired (i.e. current, sea bottom, etc.).
VIDEO: Bio-rock (Whale Shark) - Malapascua
Description of the inspiration from nature
Originally researched by architect/marine scientist Professor Wolf Hilbertz and biologist Dr. Thomas J. Goreau, BioRock was inspired by nature’s coral reefs. They focused on coral propagation, preservation of corals, and coral reef restoration. I believe that this inspiration came about because the “coral reefs are the most imperiled ecosystem, with accelerating mortality from globally increasing temperature, disease, and pollution” (Goreau et al., 2003). I believe that creating the electrical current and creating the precipitates came from the idea that there are multiple salts in sea water (although this topic is not discussed in Hilbertz paper).
VIDEO: Pulau Gangga Biorock Project, North Sulawesi, Indonesia
VIDEO: Lauderdale By The Sea Biorock Reef Project
Description of the process that led to the architectural design (if possible)
Biorock technology arose from experiments in the 1970s when Hilbertz was studying how seashells and reefs grow, by passing electrical currents through salt water. In 1974, he found that as the salt water electrolyzes, calcium carbonate slowly forms around the cathode, eventually coating the electrode with a material as strong as concrete. He initially thought that this technology could be used to create underwater structures. “Other applications for the electrochemical accretion process can be seen readily: floating habitats and industrial islands, settlements on banks, shoals, and the continental shelves” (Hilbertz, 1979, p 110). It wasn’t until the 1980’s after meeting Dr. Thomas J. Goreau that his focus shifted to coral reefs.
VIDEO: Biorock - saving the reef in Pemuteran, Bali
Sources:
Davies Alpine House at Kew Gardens
The Kew gardens are located in London
I chose to include the map to drive home the point that this structure is nowhere near an alpine ecosystem, yet many varieties of alpine plants enjoy year-round cool conditions despite constantly changing external weather conditions. Unlike other greenhouses specializing in housing plants that typically grow above tree line, the Davies Alpine house does not rely on energy-gobbling air conditioners. Instead, the house has been designed in such a way that the cool temperatures are maintained using passive cooling techniques. The designers of this structure took a cue from the passive cooling found in termite mounds and used that to inform their design (Bellew 2006). One of the keys to the passive cooling is the tall, narrow design of the building itself which draws warm air up and out through roof vents. The air that is pulled in to replace the lost hot air is brought in through vents low to the ground. Also, there is a separate natural form of air conditioning that is employed inside the house itself. Outside air is brought in via a small fan and forced through a labyrinth-like series of concrete chambers under the floor of the greenhouse. This cools the air before it is pumped into the greenhouse to be recirculated.
A schematic for the subfloor cooling labyrinth. The warm air is drawn in at one end and forced through a labyrinth of concrete pillars that are cooled at night. The air is cooled as it reaches the other end and it is circulated in the greenhouse. image: Wilkinson Eyre Architects
This design is not only beautiful, but extremely functional and amazingly energy efficient. I do consider the design of the passive cooling system as bioinspired, borrowing from termite mound design. I also consider this a big societal win. The double-floor cooling labyrinth is a very low-tech, yet highly effective method of maintaining a constant cool environment at a drastic savings in energy costs. This simple design could change the way large spaces are cooled and would not require a very large up front cost, as some other bioinspired designs do.
Resources:
Bellew, P. (2006) Going Underground. Retrieved from: http://www.ingenia.org.uk/ingenia/articles.aspx?Index=389
Kew Gardens: http://www.kew.org/visit-kew-gardens/explore/attractions/davies-alpine-house
Seawater Greenhouse
Seawater Greenhouses. Seawatergreenhouse.com
Bioinspired Architectural Structure:
Seawater evaporates at the front of the greenhouse, which then creates a cool, humid environment inside the greenhouse. A portion of the evaporated seawater will then condense as fresh water that can be used to irrigate the crops inside. If excess freshwater is created, it can be irrigated to water additional crops outside of the greenhouse. The air that enters the greenhouse is cooled and humidified by seawater, and passes over the first evaporator. As the air leaves the crop growing area, it will then pass through a second evaporator, over which more seawater is flowing. The seawater was heated by the sun, in a network of pipes, which will allow the air to become hotter and more humid, leaving optimal conditions for growing crops. The heated air then meets a series of vertical pipes, which contains cool seawater. When the two meet, freshwater will condense as droplets that run down the base where it can be collected.
Inspiration from Nature:
The Namib Desert is known as one of the most arid habitats on Earth. Since water is essential to all living things, the beetles have adapted ways to harness water from their environment. The Namib beetle has also inspired self-filling water bottles that draw moisture from the air. Although there is little water in the desert, there is fog. The beetles utilized their body surface to collect the water from the fog. The beetles adopt a head standing posture, facing into the wind. The fog water collects on their elytra and runs down to their mouth. The elytra contain structures with hydrophilic peaks, surrounded by hydrophobic areas, allowing fast forming droplets to occur, and roll down towards the head of the beetle.
Process:
Freshwater is a very limited resource on this Earth. Not only do people need it to drink, they need it to feed crops and animals for food. Water shortage and the incapacity to grow food due to environmental conditions are two basic causes of poverty. Starting 1991, Light Works LTD began developing the conceptual system. The first project commenced in 1992, with positive results, on the Canary Island of Tenerife. The company then created two research centers that worked in more extreme climates, increased water production rates and improved climate control.
Societal Win?
Yes, I believe the seawater greenhouse technology is a societal win. The system does not rely on scarce fresh water, costly water desalination equipment, or fossil fuel climate control systems. It also allows people to grow crops in areas that are desolate, and are not being used by humans, so that the crops are not taking up most of the areas suitable for people to live. Also, people can produce fruits, vegetables, and other crops in areas that are extremely dry, and cannot otherwise host plant life.
Biomimicry or Bioinspiration?
I believe this system is a bioinspiration design. Although they are using the idea of creating freshwater from an area of little to no water source available, similar to the beetle, they are not trapping the water from just fog. The system uses complex heating and cooling of air and seawater to collect the freshwater, whereas the beetle is just allowing the droplets of freshwater to from on its elytra and run to its mouth. The greenhouse system does not use the idea of hydrophobic and hydrophilic parts to collect the freshwater, whereas the beetle does.
References:
Seawater Greenhouse: http://www.seawatergreenhouse.com/
A New Approach to Restorative Agriculture: http://www.globalwaterforum.org/2012/05/28/seawater-greenhouse-a-new-approach-to-restorative-agriculture/
Simulation of Fresh Water Production Using a Humidification Dehumidification Seawater Greenhousehttp://bibliotecavirtualut.suagm.edu/Publicaciones_profesores/mgoosen/simulation%20of%20fresh%20water%20production%20using%20a%20humidification-dehumidification%20seawater%20greenhouse.pdf
VIDEO: Using Seawater to Farm in the Desert: http://www.bloomberg.com/video/using-seawater-to-farm-in-the-desert-Uptn~KIyS9Sea7cMQ8YUlg.html
Namib Beetle: http://www.bbc.com/news/technology-20465982
Fog Basking Behaviour and Water Collection Efficiency in Namib Beetles: http://www.ncbi.nlm.nih.gov/pmc/articles/PMC2918599/
SILK PAVILION
Description of the bioinspired architectural structure or feature;
The Silk Pavilion is an architectural design. It was created by digital fabrication technologies along with many silkworms (Oxman, Laucks, Kayser, Gonzalez, & Duro-Royo, nd). It was created in a two-step process. The primary structure was created by a computer-numerically controlled (CNC) machine. This machine was able to lay down 26 polygonal panels that were made of silk thread (Oxman, Lauchs, Kayser, Gonzalez, Duro-Royo, nd). The secondary structure of the architectural piece that was finished by silkworms. These 6,500 silkworms were put at the bottom of the structure (Hollister, 2013). The silkworms then filled gaps that were created by the CNC machine. According to Stott (2013), silkworms have a preferences for darker areas and were able to complete their job because it was set in a darker environment. Once the silkworms went through their pupation stage, they were removed (Oxman, Lauchs, Kayser, Gonzalez, Duro-Royo, nd). The Silk Pavilion is a functional space for humans (Stott, 2013).
Description of the inspiration from nature (make connections to Module 7’s lecture and readings);
According to Module 7, designing an architectural building is a hierarchical process. What that means is that it starts with a base and then builds up. Silkworms, on the other hand, do not follow a hierarchical process. They work alone. Except when they created the Silk Pavilion. When they were creating the Silk Pavilion, the silkworms were being led, in a sense, by the Computer-Numerically Controlled machine.
Researchers got the idea to use silkworms after a bit of research. 3D printing, also known as additive manufacturing, is a process used to recreated a 3D structure from digital files. In order to do this, there are two basic characteristics that need to be kept in mind. The first is known as tunability. Tunability is the degree at which a material is sophisticated or complicated. The second attribute is communication between fabrication units (Oxman, Duro-Royo, Keating, Peters, Tsai, 2012). After many researcher projects, these scientists were able to create a type of Swarm Printing. Swarm Printing had a high tunability rating but a low communication rating (Oxman, Duro-Royo, Keating, Peters, Tsai, 2012). What this means is that silkworms are able to create extremely complicated and sophisticated structures, but they do so mainly alone with little coordination or communication. Researchers also found that silkworms are very adaptable in their environments as well as their spatial parameters. Researchers first ran a test on the computer to see if this would work. They found that it would indeed work and would use nearly 50,000 feet of digitally spun silk (Oxman, Duro-Toyo, Keating, Peters, & Tsai, 2012).
References:
Hollister, S., (2013). MIT enlists 6500 silkworms and one robot to print a silk pavilion. Retrieved from: http://www.theverge.com/2013/6/6/4401184/mit-media-lab-silk-pavilion.
Oxman, N., Duro-Royo, J., Keating, S., Peters, B., & Tsai, E. (2012). Towards robotic swarm printing. Retrieved from: http://neri.media.mit.edu/assets/pdf/Oxman_Swarm_Printing.pdf.
Oxman, N., Laucks, J., Kayser, M., Gonzalez, D.,& Duro-Royo, J. (nd). Biological computation for digital design and fabrication. Retreived from: http://neri.media.mit.edu/assets/pdf/278.pdf.
Stott, Rory. "Silk Pavilion / MIT Media Lab" 06 Jun 2013. ArchDaily. Accessed 31 Jul 2014. <http://www.archdaily.com/?p=384271>
I have two options for this week’s introductory video. The first is a 4 min. bit from a National Geographic episode about finding Giant Squid. The video they’ve captured of bioluminescence is incredible.
http://www.youtube.com/watch?v=9HXXQBz6Vv0
This is a 12 min. TED talk by marine biologist Edith Widder titled “The Weird and Wonderful World of Bioluminescence.”
https://www.ted.com/talks/edith_widder_the_weird_and_wonderful_world_of_bioluminescence
Background
As the name implies and the videos demonstrate, bioluminescence is light generated by a living organism. This light is generated via chemical reactions within the organism. Bioluminescence occurs in a wide diversity of organism from singled cell dinoflagellates and bacteria to vertebrates such as fish and squid. The trait has evolved independently many times as is indicated by the several distinct bioluminescent mechanism found in different organisms (Haddock et al 2011). Despite the great diversity of organisms that create light, almost all are found in marine ecosystems.
In 2010 Theo Sanderson, a geneticist at the Wellcome Trust Sanger Institute, set off with his colleagues to try to induce bioluminescence in E. coli. They transferred a gene from bioluminescent bacteria that live symbiotically in squid into E. coli. His team as well as other teams working on bioluminescence focused their studies on the reaction between luciferin and luciferase, the protein and enzyme that react to create the characteristic glow of fireflies (and some other organisms). A major stumbling block in the history of synthetic bioluminescence has been researchers’ inability to create and/or recycle luciferin. Most engineered organisms required the addition of luciferin, which kept the process cost prohibitive and not commercially viable.
Bioglow
In 2010 Sanderson remarked, “We imagined that perhaps in the future, rather than erecting streetlights, people might be able to plant glowing trees.” (Schleeter 2013). In part through the help of a very successful Kickstarter campaign, the dream is very close to reality. Just this year, small bioluminescent plants, dubbed Starlight Avatars, have gone on sale to the public by a company called Bioglow.
Check out the video here:
http://blog.suny.edu/2014/03/future-cities-lit-by-beautiful-bioluminescent-trees/
These plants are fully autonomous, in that they do not require the plant be fed luciferin. The light produced is very dim, though. The researcher I mentioned before, Theo Sanderson, is not a part of Bioglow, but he did wrote a very informative blog post about what is different about the Starlight Avatar, and it’s limitations: http://splasho.com/blog/. Basically, the Bioglow group has tweaked a few DNA segments in hopes of ramping up the expression of the luciferin/ luciferase combo. There still are many unknown limiting factors that need to be identified and worked around before the dream of usable biological light becomes a reality.
I think engineering bioluminescent organisms could be a societal win, with some practical applications. The real draw of bioluminescence, natural or engineered, is in its stunning beauty and the wonder that it induces in us.
References:
Haddock, S.H.D.; McDougall, C.M.; Case, J.F. "The Bioluminescence Web Page", http://biolum.eemb.ucsb.edu/ (created 1997; updated 2011; accessed 07/17/14).
Morgan, M. (2014). Future Cities Lit by Beautiful Bioluminescent Trees. Retrieved from:
http://blog.suny.edu/2014/03/future-cities-lit-by-beautiful-bioluminescent-trees/
Sanderson, T. (2014). Crowd-funding Avatar? http://splasho.com/blog/
Schleeter , R. (2013) Everlasting Light. Retrieved from:
http://education.nationalgeographic.com/education/news/everlasting-light/?ar_a=1
Crickethair Sensor
On the abdomen of crickets are tiny sensitive hairs called cerci. Each cercus is about 1 cm long and is covered in 500 to 750 filiform mechanosensory hairs. The function of the cerci is for sensory and the detection of predators. The air current that flows past the hairs carries information about the location of predators and which direction they are moving. The nerves at the end hairs take in the information about the current and send it to the brain for processing.
Using the cerci of crickets for bioinspiration, scientists at the University of Twente have created a new kind of camera capable of imaging entire flow patterns, rather than focusing on a single point. Like the cricket’s cerci, the camera contains numerous hairs. However these hairs are created out of epoxy to make them flexible. The hairs move on top of a suspended plate, the movements of the hairs are measured. By using an entire field of fine hairs it is possible to identify patterns of flow or change in the area being observed.
Currently scientists are using this technology to uncover hidden signals. The hairs can be used to amplify the weak signal by a factor of 25. Similar to using the hairs to measure movement, as the small hairs change directions, the flow patterns can be measured, and turned into a signal.
BOIDS and other computer simulations
Technology / Biology/ Inspiration behind it for the programs:
BOIDS refers to a computer program that simulates the flocking behavior of birds. It was invented by a man named Craig Reynolds and it is important to provide some background on the inventor. Craig Reynolds writes software that attempts to understand nature, particularly complex natural phenomenon. One of his original programs was simulating the group behavior or flocking nature of birds. The program controls the actions of the animals in a virtual world1. Here is Craig Reynolds:
The original idea was designed in 1986 and in 1987, Craig Reynolds published a paper regarding his work. No one had included the aggregrate motion of animals such as flocks of birds, herds on animals, or schools of fish, in a computer animation before. Rather than scripting the paths of each individual animal, the flock is part of a particle system and each 'simulated bird' is a particle. Because of this, each bird is considered independent as it navigates the course and chooses its own direction2. The individual bird moves based on three steering behaviors - separation, alignment, and cohesion. Separation is the ability to steer to avoid crowding around other birds. Alignment refers to the steering towards the average heading of other birds. Cohesion involves steering to move toward the average position (center of mass) of other birds3. Here are images representing each behavior:
Here is a short clip of the original simulation: Craig Reynolds - Original 1986 Boids simulation. Incidentally, I was wondering where the term BOID came from or what the letters represented. It turns out that is referring to a 'bird like object' but the pronunciation is that of a New Yorker pronouncing the word bird or 'boid'4!
After the Boids model became more well known and understood, improvements were made by other programmers. The Boids simulation is considered an individual based model that captures the global behavior of a large number of organisms. Large flocks can be simulated using algorithmic speed-ups and fast hardware3. I have included a video from 2013 that shows a computer simulation using the Boids algorithm: 3D boids flocking algorithm demo, Unity 3D - w annotations. Another interesting fact is that this program has been used beyond the scientific community. Directors are now using this in their animated films in hollywood. Tim Burton's 'Batman Returns' was the first to use this technology for the bat swarms and penguin flocks (you can see them slightly in this clipBatman Returns: The Penguin's Plan.)
Another computer program based on flocking motion is the FlockMaker: Simulator for Collective Motion. Willa Chen, Naomi Leonard and Susan Marshall created this simulator at Princeton University and it is now the focus of a course at the University. Susan Marshall is a choreographer while Naomi Leonard studies animals groups and robotics. This simulation looks at how humans (some are dancers and some are not) can follow rules for sensing and response in the same way birds or fish follow the rules when they are grouped together. In the same way that animals follow a complex set of rules in their groups, people will be asked to follow different combinations of rules based on their environment, initial conditions, prior knoweldege and other variables. The movement of people will be modeled as particles, similar to the birds in the Boids model5. The original project or flock project was a combination of art and science. In terms of the artistic component, tools for choreography would be created based on designed feedback and interactions. In terms of the scientific component, the goal was to develop insights into things like human crowds, animal groups, and robotic networks. This project looks at the individual movement of dancers /non dancers and how those movements are connected to the group movements6. You can check out some of the performances at this link: http://www.princeton.edu/~flocklogic/7.
The idea behind both of these simulations if the ability of animals to group together in an organized manner. Scientists like Iain Couzin, for example, study animal behavior in order to understand human behavior. It seems like computer models are emerging as the tool to help comprehend this type of behavior. Scientists can learn about migration patterns of animals and what can occur if those patterns are disrupted. Couzin believes the movement of animals is an emergent property or one that is a characteristic of the interaction itself and not of the individual animals7. We also see organisms like the ant that do not appear to have any central control. Their behavior as a group stems from interactions among the individual ants8. There are people who think studying this behavior lead to the movement of information across the Internet (Anternet) and others who think the ant behavior is a bit more unorganized compared to our control of the data on the Internet9. Whether or not this is true, it is obvious that animal behavior is clearly a factor in today's world of technology.
Underwater Vehicles
In this glossary post, I will be discussing how unmanned underwater vehicles are said to be bioinspired. Remotely Operated Vehicles (ROV) and Autonomous Underwater Vehicles (AUV) are what researchers and engineers are designing. An AUV or ROV can be any self-contained vehicle that is able to operate without an external connection (Roper, Sharma, Sutton, & Culverhouse, 2011). These vehicles are small; some are similar in size as normal fish (Healey, Rock, Cody, Miles, & Brown, 1995). However, though they be small, they are indeed mighty. According to Healey, Rock, Cody, Miles, & Brown (1995), they are able to execute positions quickly and efficiently. AUV’s and ROV’s are the alternative to a manned submarine. With a ROV or an AUV, there are now capabilities to apply this technology to our seas and oceans without a lot of cost or manpower (Christi, Papoulias, & Healey, 1990). AUV’s, however, can be difficult to control; later in the paper I will describe what some researchers are trying to accomplish with AUV’s.
Description of the inspiration from nature (make connections to Module 6’s lecture and readings);
The inspiration from nature comes from the water. According to multiple papers that I read, fish were the main inspiration. In Module 6, it discusses how some organisms are able to pick up signals from one another and communicate. Researchers watched schools of fish and determined that if fish were able to be active and able, then so could robots. According to Smith, Hanmann, & Leonar (nd), fish and some other organisms in the water are said to use rules that are simplistic in nature when they are alone. However, when these organisms get into groups, there abilities seem to amplify. Examples of what these organisms can do when they get in bigger groups are as follows: rapid maneuverability, process data quicker, and enhanced decision-making abilities (Smith, Hanmann, & Leonar, nd). Schools of fish are able to maintain cohesion in their group by communicating and watching the fish around them. They are also able to acquire a sense of space between them and others whilst in motion (Smith, Hanmann, & Leonar, nd). According to Roper, Sharma, Sutton, & Culverhouse (2011), the fish that researchers were studying were able to maneuver and outperform some marine locomotion systems. This means that these fish have acquired better and more efficient locomotion skills which are now being transferred to the underwater vehicles.
Lastly, I want to discuss where researchers are hoping to go with this technology. Some researchers are trying to design a better thruster system to apply to the underwater vehicles (Healey, Rock, Cody, Miles, Brown, 1995). Some researchers want to apply an automatic controller that is simple to control but also sophisticated to maneuver in complicated situations (Christi, Papoulias, & Healey, 1990). Finally, some researchers are working on a way to make the underwater vehicles more sustainable by harnessing energy from turbulent flow and redirecting that into a power source (Roper, Sharma, Sutton, & Culverhouse, 2011). All of these ideas are powerful and interesting, however, my hope goes to the last idea. There are many applications for underwater vehicles that can be utilized and having it create a power source through turbulent flow is a win, in my opinion.
References:
Christi, R, Papoulias, F., & Healey, A. (1990). Adaptive sliding mode control of autonomous underwater vehicles in the dive plane. Journal of Oceanic Engineering, 15(3). 152-160.
Healey, A. & Lienard, D. (1993). MULTIVARIABLE SLIDING-MODE CONTROL FOR AUTONOMOUS DIVING AND STEERING OF UNMANNED UNDERWATER VEHICLES. Journal of Oceanic Engineering, 18(3). 327-339.
Healey, A.J., Rock, S.M., Cody, S., Miles, D., & Brown, J.P. (1995). Toward and improved understanding of thruster dynamics for underwater vehicles. Journal of Oceanic Engineering, 20(4). 354-361.
Roper, D., Sharma, S., Sutton, R. & Culverhouse, P. (2011). A review of developments towards biologically inspired propulsion systems for autonomous underwater vehicles. Journal of Engineering For The Maritime Environment.
Smith, T., Hanmann, H., & Leonar, N. (nd). Orientation control of multiple underwater vehicles with symmetry-Breaking potentials. Retrieved from: http://www.princeton.edu/~naomi/cdc1753.pdf.
BioRock (Biorock)
Description of the bioinspired architectural structure or feature.
Biorock uses a low voltage electrical current to seawater to cause dissolved minerals to adhere to a structure. The result of this adhesion is a material that is a composite of brucite and limestone. This composite material has the strength similar to that of concrete. To build a biorock reef, a frame is built from construction grade revar or wire mesh. This structure is then anchored to the sea floor, and a low voltage direct current is applied using an anode. Once the reef structure is in place and minerals begin to coat the surface, divers will go down and transplant fragments from other reefs to the frame. The new reef tends to grow faster than a normal reef. The biorock structures can be built in any size or shape, as long as the structure can survive the location desired (i.e. current, sea bottom, etc.).
VIDEO: Bio-rock (Whale Shark) - Malapascua
Description of the inspiration from nature
Originally researched by architect/marine scientist Professor Wolf Hilbertz and biologist Dr. Thomas J. Goreau, BioRock was inspired by nature’s coral reefs. They focused on coral propagation, preservation of corals, and coral reef restoration. I believe that this inspiration came about because the “coral reefs are the most imperiled ecosystem, with accelerating mortality from globally increasing temperature, disease, and pollution” (Goreau et al., 2003). I believe that creating the electrical current and creating the precipitates came from the idea that there are multiple salts in sea water (although this topic is not discussed in Hilbertz paper).
VIDEO: Pulau Gangga Biorock Project, North Sulawesi, Indonesia
VIDEO: Lauderdale By The Sea Biorock Reef Project
Description of the process that led to the architectural design (if possible)
Biorock technology arose from experiments in the 1970s when Hilbertz was studying how seashells and reefs grow, by passing electrical currents through salt water. In 1974, he found that as the salt water electrolyzes, calcium carbonate slowly forms around the cathode, eventually coating the electrode with a material as strong as concrete. He initially thought that this technology could be used to create underwater structures. “Other applications for the electrochemical accretion process can be seen readily: floating habitats and industrial islands, settlements on banks, shoals, and the continental shelves” (Hilbertz, 1979, p 110). It wasn’t until the 1980’s after meeting Dr. Thomas J. Goreau that his focus shifted to coral reefs.
VIDEO: Biorock - saving the reef in Pemuteran, Bali
Sources:
- Goreau, T. J., Hilbertz, W., Azeez, A., Hakeem, A., Dodge, R., Despaigne, G., & Shwaiko, C. (2003, September). Restoring coral reefs, oyster banks, and fisheries by seawater electrolysis: coastal zone management and tourism applications. In OCEANS 2003. Proceedings (Vol. 2, pp. 755-Vol). IEEE.
- Hilbertz, W. (1979). Electrodeposition of minerals in sea water: Experiments and applications. Oceanic Engineering, IEEE Journal of, 4(3), 94-113.
- http://www.biorock.net/Technologies/index.html
- http://en.wikipedia.org/wiki/Biorock
Davies Alpine House at Kew Gardens
The Kew gardens are located in London
I chose to include the map to drive home the point that this structure is nowhere near an alpine ecosystem, yet many varieties of alpine plants enjoy year-round cool conditions despite constantly changing external weather conditions. Unlike other greenhouses specializing in housing plants that typically grow above tree line, the Davies Alpine house does not rely on energy-gobbling air conditioners. Instead, the house has been designed in such a way that the cool temperatures are maintained using passive cooling techniques. The designers of this structure took a cue from the passive cooling found in termite mounds and used that to inform their design (Bellew 2006). One of the keys to the passive cooling is the tall, narrow design of the building itself which draws warm air up and out through roof vents. The air that is pulled in to replace the lost hot air is brought in through vents low to the ground. Also, there is a separate natural form of air conditioning that is employed inside the house itself. Outside air is brought in via a small fan and forced through a labyrinth-like series of concrete chambers under the floor of the greenhouse. This cools the air before it is pumped into the greenhouse to be recirculated.
A schematic for the subfloor cooling labyrinth. The warm air is drawn in at one end and forced through a labyrinth of concrete pillars that are cooled at night. The air is cooled as it reaches the other end and it is circulated in the greenhouse. image: Wilkinson Eyre Architects
This design is not only beautiful, but extremely functional and amazingly energy efficient. I do consider the design of the passive cooling system as bioinspired, borrowing from termite mound design. I also consider this a big societal win. The double-floor cooling labyrinth is a very low-tech, yet highly effective method of maintaining a constant cool environment at a drastic savings in energy costs. This simple design could change the way large spaces are cooled and would not require a very large up front cost, as some other bioinspired designs do.
Resources:
Bellew, P. (2006) Going Underground. Retrieved from: http://www.ingenia.org.uk/ingenia/articles.aspx?Index=389
Kew Gardens: http://www.kew.org/visit-kew-gardens/explore/attractions/davies-alpine-house
Seawater Greenhouse
Seawater Greenhouses. Seawatergreenhouse.com
Bioinspired Architectural Structure:
Seawater evaporates at the front of the greenhouse, which then creates a cool, humid environment inside the greenhouse. A portion of the evaporated seawater will then condense as fresh water that can be used to irrigate the crops inside. If excess freshwater is created, it can be irrigated to water additional crops outside of the greenhouse. The air that enters the greenhouse is cooled and humidified by seawater, and passes over the first evaporator. As the air leaves the crop growing area, it will then pass through a second evaporator, over which more seawater is flowing. The seawater was heated by the sun, in a network of pipes, which will allow the air to become hotter and more humid, leaving optimal conditions for growing crops. The heated air then meets a series of vertical pipes, which contains cool seawater. When the two meet, freshwater will condense as droplets that run down the base where it can be collected.
Inspiration from Nature:
The Namib Desert is known as one of the most arid habitats on Earth. Since water is essential to all living things, the beetles have adapted ways to harness water from their environment. The Namib beetle has also inspired self-filling water bottles that draw moisture from the air. Although there is little water in the desert, there is fog. The beetles utilized their body surface to collect the water from the fog. The beetles adopt a head standing posture, facing into the wind. The fog water collects on their elytra and runs down to their mouth. The elytra contain structures with hydrophilic peaks, surrounded by hydrophobic areas, allowing fast forming droplets to occur, and roll down towards the head of the beetle.
Process:
Freshwater is a very limited resource on this Earth. Not only do people need it to drink, they need it to feed crops and animals for food. Water shortage and the incapacity to grow food due to environmental conditions are two basic causes of poverty. Starting 1991, Light Works LTD began developing the conceptual system. The first project commenced in 1992, with positive results, on the Canary Island of Tenerife. The company then created two research centers that worked in more extreme climates, increased water production rates and improved climate control.
Societal Win?
Yes, I believe the seawater greenhouse technology is a societal win. The system does not rely on scarce fresh water, costly water desalination equipment, or fossil fuel climate control systems. It also allows people to grow crops in areas that are desolate, and are not being used by humans, so that the crops are not taking up most of the areas suitable for people to live. Also, people can produce fruits, vegetables, and other crops in areas that are extremely dry, and cannot otherwise host plant life.
Biomimicry or Bioinspiration?
I believe this system is a bioinspiration design. Although they are using the idea of creating freshwater from an area of little to no water source available, similar to the beetle, they are not trapping the water from just fog. The system uses complex heating and cooling of air and seawater to collect the freshwater, whereas the beetle is just allowing the droplets of freshwater to from on its elytra and run to its mouth. The greenhouse system does not use the idea of hydrophobic and hydrophilic parts to collect the freshwater, whereas the beetle does.
References:
Seawater Greenhouse: http://www.seawatergreenhouse.com/
A New Approach to Restorative Agriculture: http://www.globalwaterforum.org/2012/05/28/seawater-greenhouse-a-new-approach-to-restorative-agriculture/
Simulation of Fresh Water Production Using a Humidification Dehumidification Seawater Greenhousehttp://bibliotecavirtualut.suagm.edu/Publicaciones_profesores/mgoosen/simulation%20of%20fresh%20water%20production%20using%20a%20humidification-dehumidification%20seawater%20greenhouse.pdf
VIDEO: Using Seawater to Farm in the Desert: http://www.bloomberg.com/video/using-seawater-to-farm-in-the-desert-Uptn~KIyS9Sea7cMQ8YUlg.html
Namib Beetle: http://www.bbc.com/news/technology-20465982
Fog Basking Behaviour and Water Collection Efficiency in Namib Beetles: http://www.ncbi.nlm.nih.gov/pmc/articles/PMC2918599/
SILK PAVILION
Description of the bioinspired architectural structure or feature;
The Silk Pavilion is an architectural design. It was created by digital fabrication technologies along with many silkworms (Oxman, Laucks, Kayser, Gonzalez, & Duro-Royo, nd). It was created in a two-step process. The primary structure was created by a computer-numerically controlled (CNC) machine. This machine was able to lay down 26 polygonal panels that were made of silk thread (Oxman, Lauchs, Kayser, Gonzalez, Duro-Royo, nd). The secondary structure of the architectural piece that was finished by silkworms. These 6,500 silkworms were put at the bottom of the structure (Hollister, 2013). The silkworms then filled gaps that were created by the CNC machine. According to Stott (2013), silkworms have a preferences for darker areas and were able to complete their job because it was set in a darker environment. Once the silkworms went through their pupation stage, they were removed (Oxman, Lauchs, Kayser, Gonzalez, Duro-Royo, nd). The Silk Pavilion is a functional space for humans (Stott, 2013).
Description of the inspiration from nature (make connections to Module 7’s lecture and readings);
According to Module 7, designing an architectural building is a hierarchical process. What that means is that it starts with a base and then builds up. Silkworms, on the other hand, do not follow a hierarchical process. They work alone. Except when they created the Silk Pavilion. When they were creating the Silk Pavilion, the silkworms were being led, in a sense, by the Computer-Numerically Controlled machine.
Researchers got the idea to use silkworms after a bit of research. 3D printing, also known as additive manufacturing, is a process used to recreated a 3D structure from digital files. In order to do this, there are two basic characteristics that need to be kept in mind. The first is known as tunability. Tunability is the degree at which a material is sophisticated or complicated. The second attribute is communication between fabrication units (Oxman, Duro-Royo, Keating, Peters, Tsai, 2012). After many researcher projects, these scientists were able to create a type of Swarm Printing. Swarm Printing had a high tunability rating but a low communication rating (Oxman, Duro-Royo, Keating, Peters, Tsai, 2012). What this means is that silkworms are able to create extremely complicated and sophisticated structures, but they do so mainly alone with little coordination or communication. Researchers also found that silkworms are very adaptable in their environments as well as their spatial parameters. Researchers first ran a test on the computer to see if this would work. They found that it would indeed work and would use nearly 50,000 feet of digitally spun silk (Oxman, Duro-Toyo, Keating, Peters, & Tsai, 2012).
References:
Hollister, S., (2013). MIT enlists 6500 silkworms and one robot to print a silk pavilion. Retrieved from: http://www.theverge.com/2013/6/6/4401184/mit-media-lab-silk-pavilion.
Oxman, N., Duro-Royo, J., Keating, S., Peters, B., & Tsai, E. (2012). Towards robotic swarm printing. Retrieved from: http://neri.media.mit.edu/assets/pdf/Oxman_Swarm_Printing.pdf.
Oxman, N., Laucks, J., Kayser, M., Gonzalez, D.,& Duro-Royo, J. (nd). Biological computation for digital design and fabrication. Retreived from: http://neri.media.mit.edu/assets/pdf/278.pdf.
Stott, Rory. "Silk Pavilion / MIT Media Lab" 06 Jun 2013. ArchDaily. Accessed 31 Jul 2014. <http://www.archdaily.com/?p=384271>
